If you made it to this post you are probably a student trying to understand linear programming and you are not sure how to solve these problems with the simplex method. That's why at PM Calculators we have created a Simplex Method Calculator Online, which will allow you to develop maximization and minimization problems by applying the traditional simplex method and the two-phase method when applicable. Our tool has a friendly and easy to use design.
Simplex Method Calculator - Free Version
The free version of the calculator shows you each of the intermediate tableaus that are generated in each iteration of the simplex method, so you can check the results you obtained when solving the problem manually.
Advanced Functions of the simplex method online calculator – Two-Phase
Let's face it, the simplex method is characterized by being a meticulous and impractical procedure, because if you fail in an intermediate calculation you can compromise the final solution of the problem. In that sense, it is important for the student to know the step by step procedure to obtain each of the values in the iterations. Thus, in PM Calculators we have improved our application to include a complete step-by-step explanation of the calculations of the method. You can access this tool and others (such as the big m calculator and the graphical linear programming calculator) by becoming a member of our membership.
Within the functionality that this application counts we have:
- Ability to solve exercises with up to 20 variables and 50 constraints.
- Explanation of how to determine the optimality condition.
- Explanation of the criteria to establish the feasibility condition.
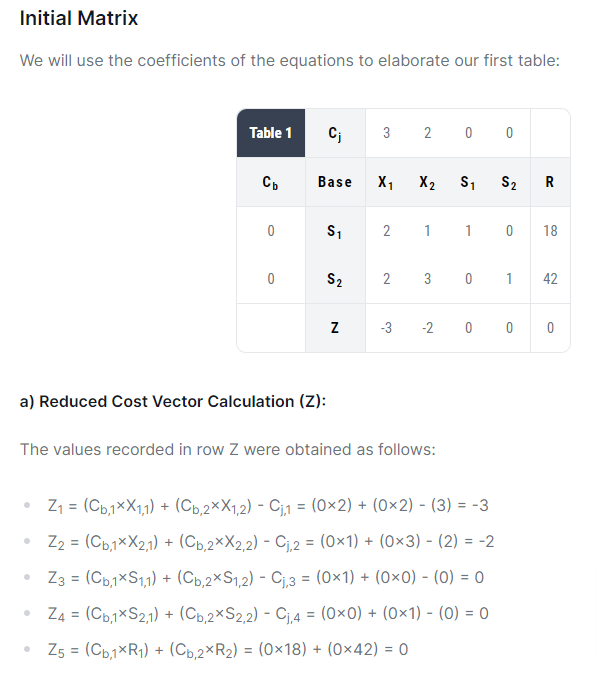
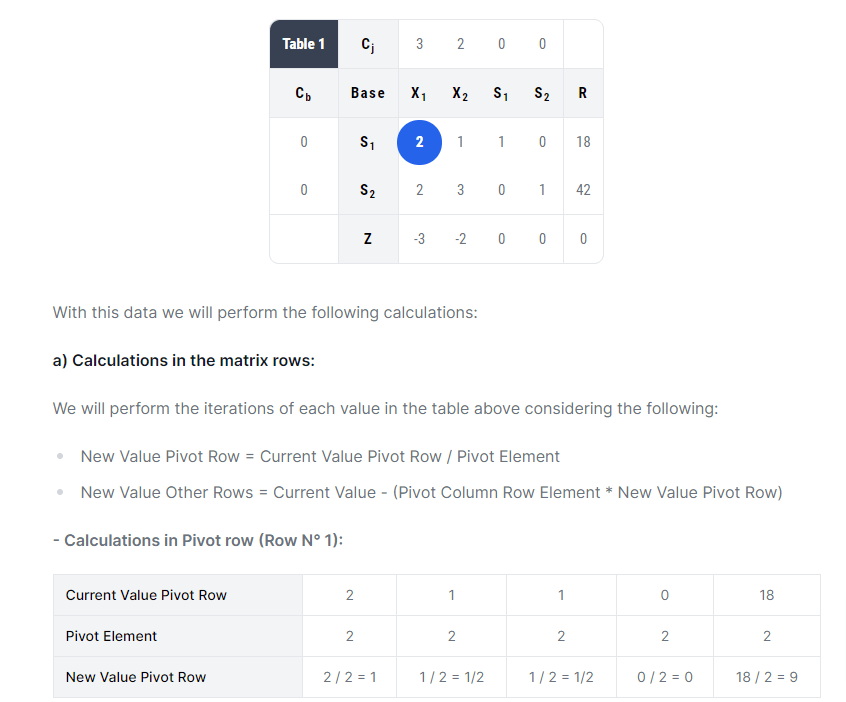
- Detail of the calculations performed to obtain the vector of reduced costs, the pivot row and the other rows of the table.
- For exercises with artificial variables it becomes a two-phase method calculator.
- Explanation of the special cases such as unbounded and infeasible solutions.
You can find complete examples of how the application works in this link.
How to use the simplex method online calculator
To use our tool you must perform the following steps:
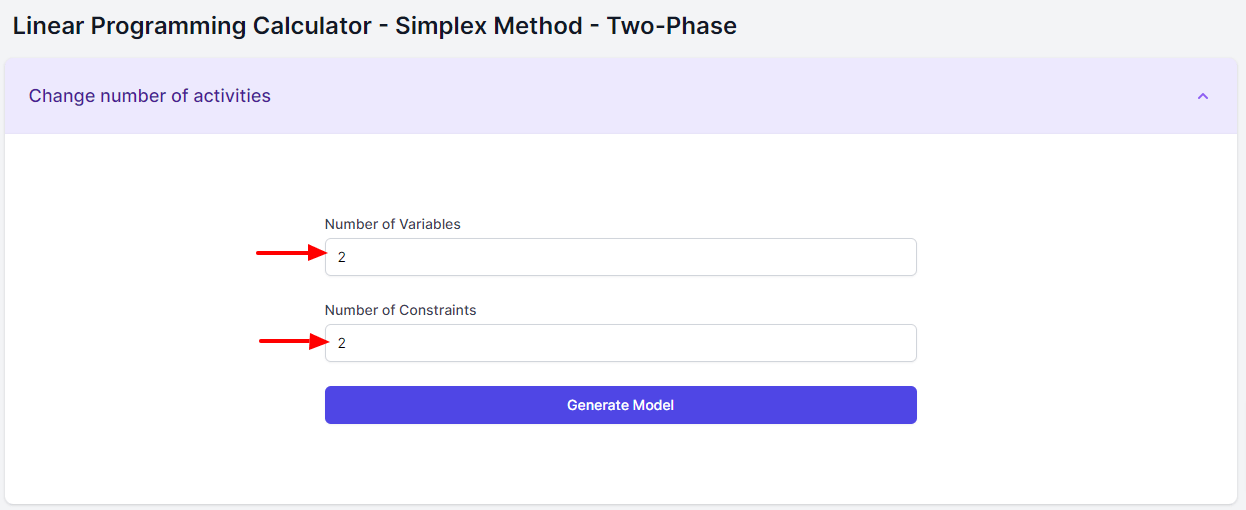
- Enter the number of variables and constraints of the problem.
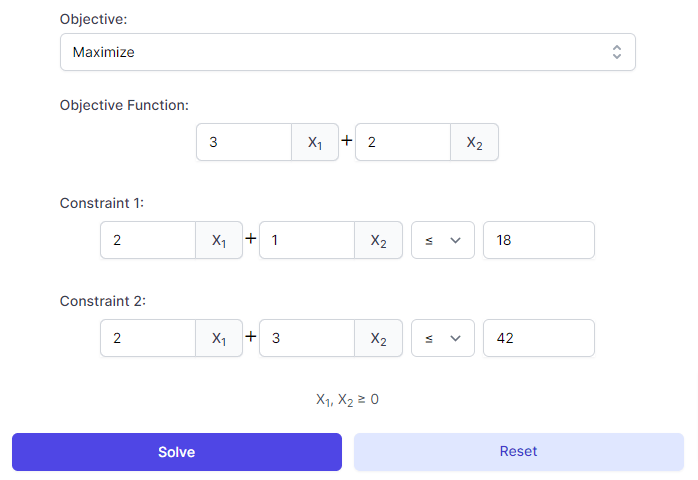
- Select the type of problem: maximize or minimize.
- Enter the coefficients in the objective function and the constraints. You can enter negative numbers, fractions, and decimals (with point).
- Click on “Solve”.
- The online software will adapt the entered values to the standard form of the simplex algorithm and create the first tableau.
- Depending on the sign of the constraints, the normal simplex algorithm or the two phase method is used.
- We can see step by step the iterations and tableaus of the simplex method calculator.
- In the last part will show the results of the problem.
We have considered for our application to solve problems with a maximum of 20 variables and 50 restrictions; this is because exercises with a greater number of variables would make it difficult to follow the steps using the simplex method. For problems with more variables, we recommend using other method.
Example
Below we show some reference images of the step by step and the result of the following example:
The following problem is required to be maximized:
Objective Function Z = 3X1 + 2X2
Subject to the following restrictions
2X1 + X2 ≤ 18
2X1 + 3X2 ≤ 42
X1, X2 ≥ 0
Solution
We enter the number of variables and constraints:
Enter the coefficients of the equations / inequalities of the problem and click on Solve:
Next you will see the step by step in obtaining the solution as well as the calculation of the vector of reduced costs:
The calculation of the values of the pivot row:
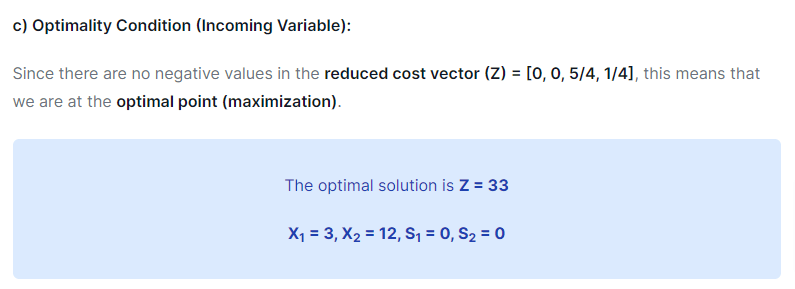
Until the final result:
Final reflection
Our free simplex minimizing and maximizing calculator is being used by thousands of students every month and has become one of the most popular online Simplex method calculators available. In addition, our full version has been helping hundreds of students study and do their homework faster and giving them more time to devote to their personal activities.
If you have questions about it or find an error in our application, we will appreciate if you can write to us on our contact page.
